Next-Generation Perception Fusion for Safer Mobility and Safety-Critical Applications
Fusionride develops and manufactures high-performance 4D mmWave radar and radar-camera AI fusion sensors, extending reliable machine perception into complex real-world conditions.
We deliver all-weather, highly robust perception solutions for autonomous driving and intelligent mobility—powering vehicles, two-wheelers, commercial low-altitude platforms, traffic sensing, AGVs, and robotics.
We don't just build technology; we build production-ready, verifiable, and scalable solutions. By optimizing sensing coverage, system costs, compute budgets, and data strategies, Fusionride provides a rock-solid perception foundation for the future of intelligent mobility.
Mission & Vision
Mission
Give machines precise perception, so intelligent systems can operate with confidence in demanding environments.
Vision
To become a globally trusted full-stack perception technology partner. Focused on mobility, robotics and intelligent infrastructure, Fusionride helps build a safer foundation for the connected world through reliable, verifiable and production-ready perception capabilities.
Values
Excellence:Pursue the highest standard with resilient focus, refining extreme-scenario capability with discipline.
Integrity:Respect life, uphold safety and pursue scientific rigor, truth and pragmatism in the real world.
Courage:Break technical and cognitive boundaries, opening new paths for reliable perception in unknown scenarios.
Brand Relationship
Fusionride and Zadar Labs
Fusionride is a Zadar Labs company, bringing DeepFusion software, embedded engineering and production delivery together with software-defined 4D imaging radar.
Product Line Integration
A broader radar portfolio, from proven 3D sensing to high-definition 4D imaging radar.
Global Market Reach
A combined network across China, Japan, the United States, Europe and Southeast Asia.
Integrated Technology Stack
Radar hardware, waveforms, signal processing and AI perception in one production stack.
Together, Fusionride and Zadar Labs support global mobility, robotics and intelligent infrastructure customers from sensing hardware to perception output.
Global Footprint
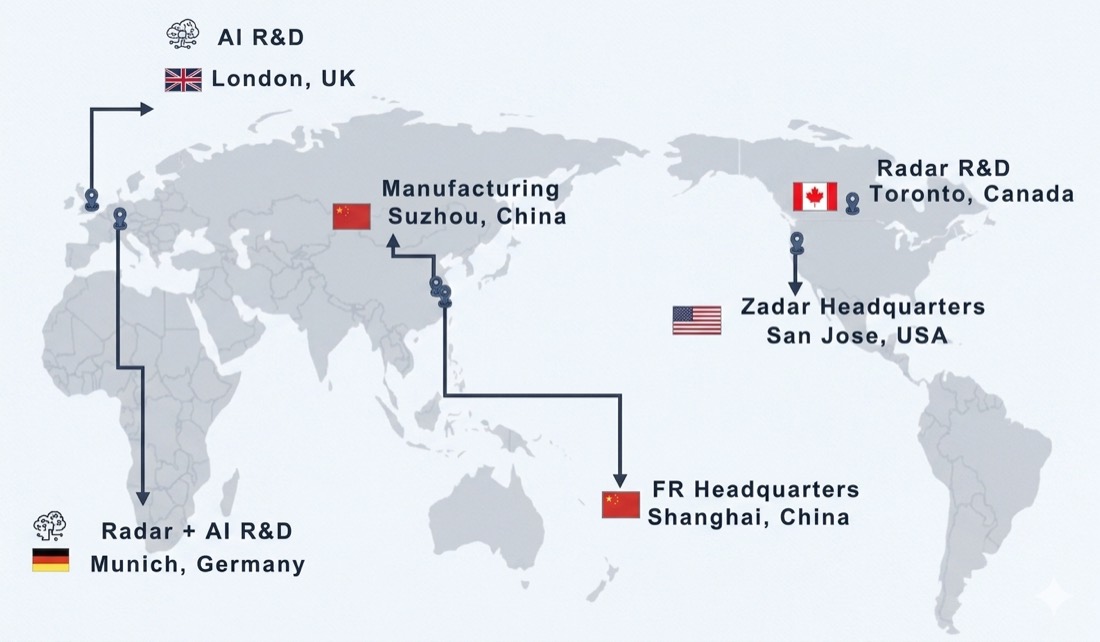
Global R&D, Manufacturing and Parent Company Footprint
Fusionride's global footprint connects Shanghai headquarters, Suzhou manufacturing, Munich R&D and Zadar Labs, its parent company in San Jose, supporting radar hardware, DeepFusion software, manufacturing and customer delivery.
Image temporarily unavailable.
2021 → 2026
Fusionride Development History
From company formation to Columbus 4D radar, Picasso centralized-compute imaging radar, Super Sensor, international customer programs and software-defined 4D imaging radar, Fusionride has built a full-stack sensing portfolio for production deployment.
Full-Stack Capabilities from Software-Defined Radar to DeepFusion Perception
Fusionride builds a production-oriented full-stack perception ecosystem. Fusionride integrates Zadar Labs' software-defined imaging radar (SDIR) platform with Fusionride's DeepFusion perception software, embedded engineering and manufacturing delivery. The platform connects configurable radar sensing, high-density 4D point clouds, radar-camera fusion and occupancy-grid understanding for vehicles, robots, low-altitude platforms and intelligent infrastructure.
Software-defined imaging radar
Zadar Labs' SDIR platform combines configurable radar hardware, software-defined waveforms, calibration, interference mitigation and dense 4D point-cloud output across range, velocity, angle and elevation.
The same SDIR foundation can be tuned for field of view, detection range, point-cloud density and angular resolution across vehicles, robots, commercial low-altitude platforms and infrastructure deployments.
Radar-camera DeepFusion
DeepFusion aligns radar and camera features earlier in the perception chain, before object-level decisions are finalized. The fused 3D / BEV representation supports obstacle detection, freespace estimation and dense scene understanding.
Radar velocity and range evidence is aligned with visual semantics in BEV space, helping perception remain stable when light, weather or target shape changes.
Robust scene understanding
The perception stack is designed for glare, low light, rain, fog, unstructured roads and unknown obstacles. Occupancy grids, temporal memory and radar physical evidence help maintain stable understanding when individual sensors degrade.
Occupancy Grid reasoning turns sparse and dense sensing evidence into a continuous understanding of free space, obstacles and safety-critical events.
Embedded Software & Production Delivery
Lightweight neural networks, automotive interfaces, time synchronization, diagnostics, validation workflows and EMS manufacturing resources support deployment on mainstream edge AI platforms and volume production programs.
The stack connects algorithm design with embedded deployment, validation, manufacturing traceability and scalable delivery for production programs.
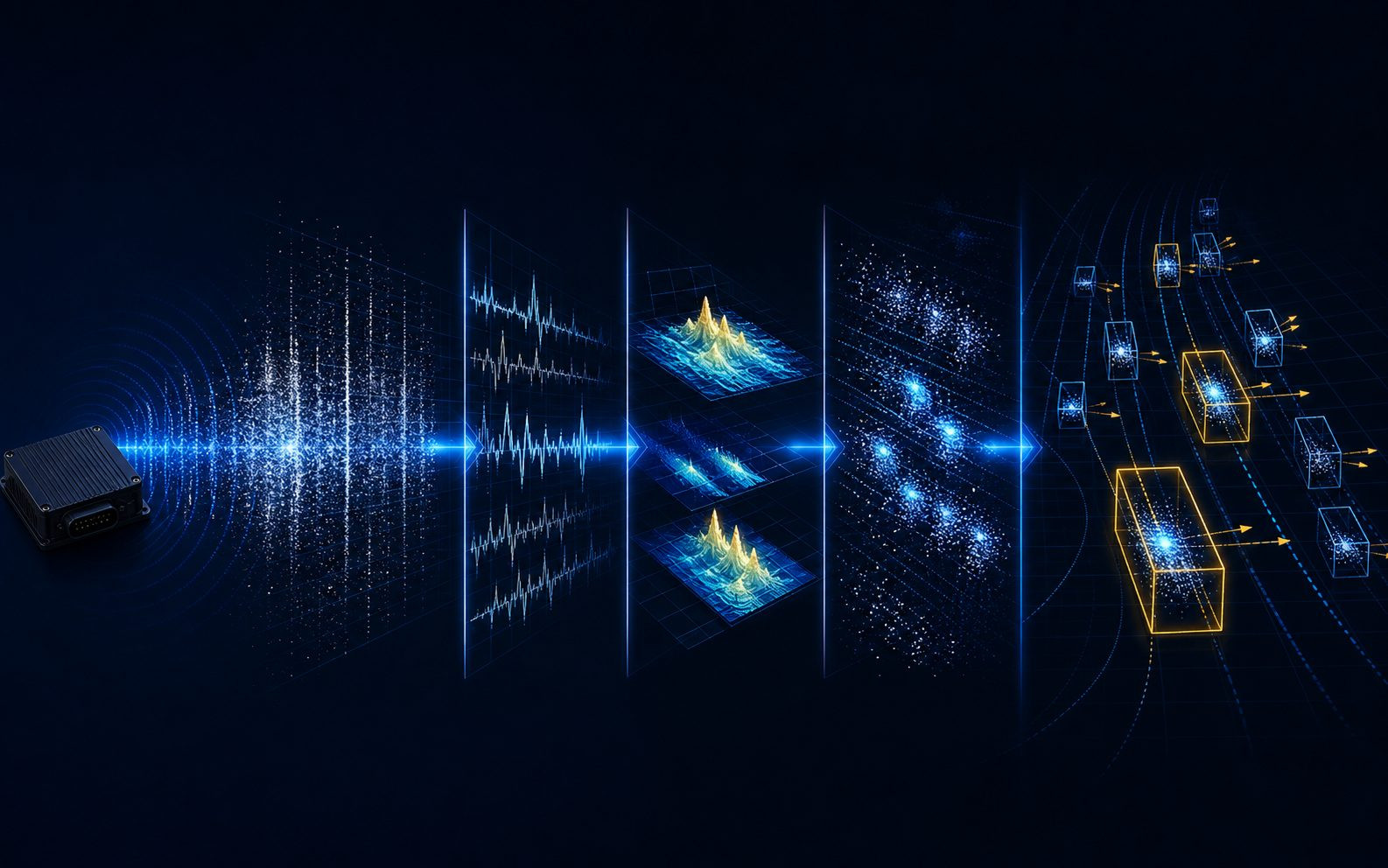
Signal Layer
From raw radar echoes to high-confidence physical evidence
The signal layer converts raw radar echoes into structured physical evidence, including range, velocity, angle, elevation, micro-motion and temporal consistency. Software-defined configuration, calibration and interference mitigation allow radar behavior to be tuned for automotive, robot, commercial low-altitude platform, and infrastructure domains.
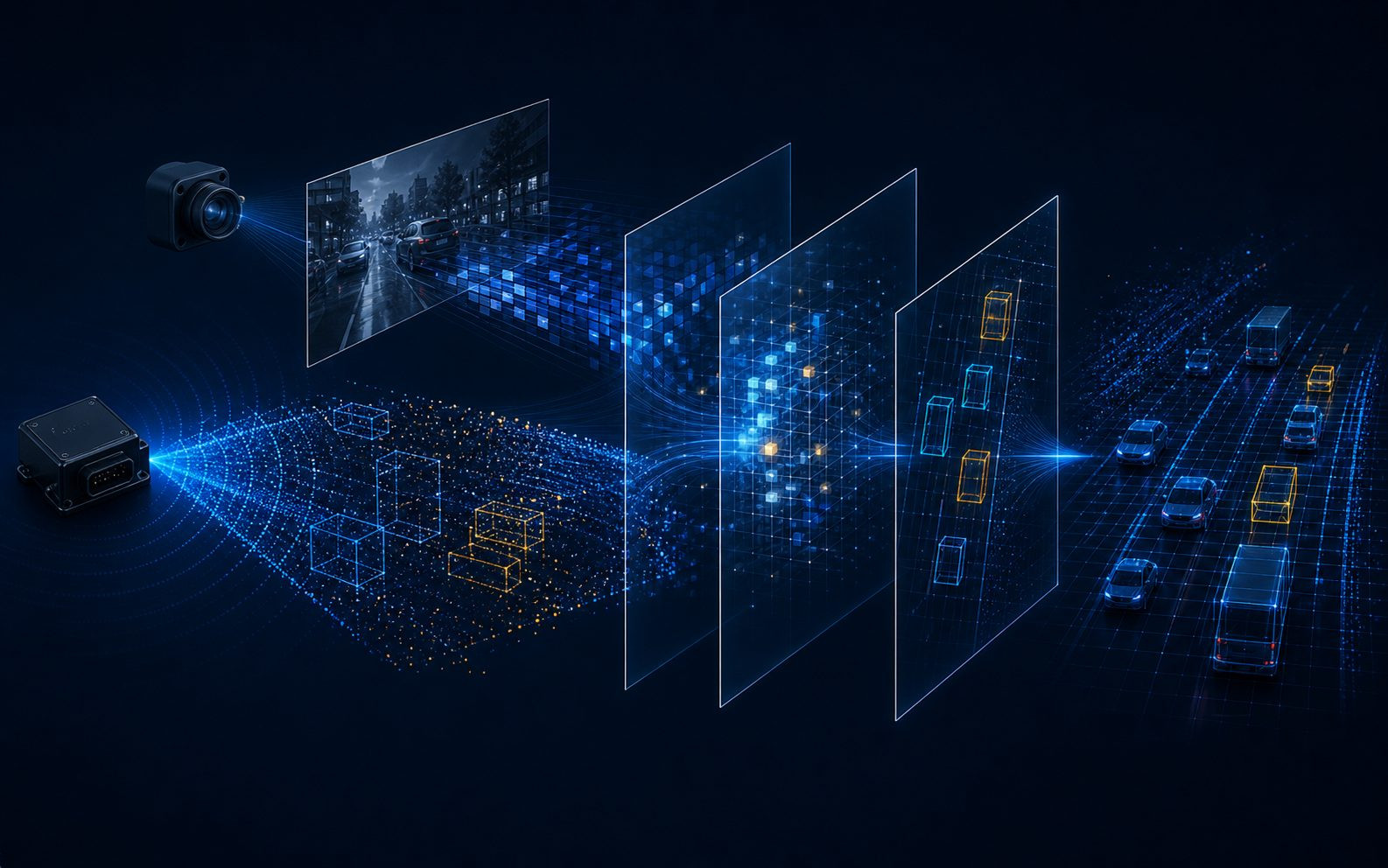
Fusion Layer
DeepFusion before object-level decisions
The fusion layer brings radar and camera information together before final object reasoning. By aligning complementary features in 3D / BEV space, DeepFusion preserves radar's all-weather ranging and velocity advantages while using visual semantics for structure, class and context.
Production Layer
A deployable stack, not a laboratory demo
The deployment layer connects algorithms with embedded software, interface adaptation, validation, data iteration and manufacturability. Fusionride delivers perception outputs that downstream systems can consume directly, including point cloud, tracking, freespace, occupancy, obstacle class, road structure and safety events.
Production Capability
Flexible Manufacturing and Delivery for Radar and Super Sensor Programs
Fusionride connects product engineering, validation testing and manufacturing resources into one delivery system for radar and super sensor programs at different scales. Its 2,400 sqm highly automated manufacturing facility supports engineering builds, pilot production and volume delivery, with annual capacity of 300,000 units as of 2025 and the ability to scale toward 800,000 units.
Product Center
Perception Products for Multiple Deployment Scenarios
Products cover automotive, two-wheeler, robotics, low-altitude platforms, care & safety and security applications.
76-81GHz | FPGA imaging radar
zPRIME (ZADAR)
Zadar flagship SDIR imaging radar for long-range, high-density 4D point-cloud perception, combining fine angular resolution, extended detection range and software flexibility.
Specification
120° x 24°
120° x 50°
120° x 90°
Field of View
120° x 24°
120° x 50°
120° x 90°
Static Angular Resolution
0.35° x 0.4°
0.35° x 0.9°
0.35° x 1.6°
Angular Accuracy
±0.05°
Truck Detection
> 1,000 m
> 400 m
> 250 m
Car Detection
> 800 m
> 400 m
> 250 m
Human Detection
> 250 m
> 150 m
> 90 m
Hardware Dimensions
140 x 103 x 36 mm
Weight
500 g (17.6 oz)
Sealing Protection
IP68 (2-meter)
Operating Temperature
-40° to 85° C
Storage Temperature
-40° to 95° C
Compliance
IEC 60068-2-27, 64, ISO 16750
Frame Time
50 ms / 20 Hz
76-81GHz | Compact FPGA radar
zPULSE (ZADAR)
Compact Zadar SDIR imaging radar for short-to-mid-range sensing, sharing the same core radar technology, processing and interfaces as zPRIME for robotics, mobility and industrial applications.
zPULSE Specifications
Field of View
120° x 90°
Static Angular Resolution
1.5°
Angular Accuracy
±0.25°
Truck Detection
> 400 m
Car Detection
> 400 m
Human Detection
> 200 m
Hardware Dimensions
80 x 70 x 40 mm
Weight
200 g
Weather Proofing
IP68 (2-meter)
4T4R | 250 m front radar
Columbus Front Radar – TI 2944
Front automotive radar for detections, objects and freespace with CAN-FD or optional Ethernet output.
Size
72 x 62.5 x 18.5 mm
Weight
<100 g
Operating Temperature
-40° to +85° C
Typical power
4.5 W nominal
Voltage
9-16 VDC
Frequency
76-77 GHz
Interface
CAN-FD / Ethernet optional
IP Level
IP6K7; IP6K9 with special connector
Channels
4T4R
Detection range
250 m @ 10 dBsm
Range accuracy
6 cm
Range resolution
0.25 m
Speed range
±330 km/h
Speed accuracy
0.023 m/s
Speed resolution
0.14 m/s
Azimuth FoV
120°
Azimuth accuracy
±0.15°
Azimuth separation
2.5°
Elevation FoV
±15°
Elevation accuracy
±1.0°
FuSa / Cybersecurity
Designed for ASIL B (ISO 26262) / HSM / AUTOSAR
4T4R | 180 m corner radar
Columbus Corner Radar – TI 2944
Corner radar for detections, objects, freespace and ADAS functions including LCDAS, RCTA/B, FCTA/B, DOW and RCW.
Size
72 x 63 x 16.4 mm
Weight
<100 g
Operating Temperature
-40° to +85° C
Typical power
4.5 W nominal
Voltage
9-16 VDC
Frequency
76-77 GHz
Interface
CAN-FD / Ethernet optional
IP Level
IP6K7; IP6K9 with special connector
Channels
4T4R
Detection range
180 m @ 10 dBsm
Range accuracy
6 cm
Range resolution
0.24 m
Speed range
±330 km/h
Speed accuracy
0.023 m/s
Speed resolution
0.14 m/s
Azimuth FoV
150°
Azimuth accuracy
±0.3°
Azimuth separation
4.8°
Elevation FoV
±15°
Elevation accuracy
±1.0°
FuSa / Cybersecurity
Designed for ASIL B (ISO 26262) / HSM / AUTOSAR
4T4R | Calterah 344
Columbus Corner Radar – Calterah 344
CAN-FD corner radar for compact ADAS functions, supporting detections, objects, freespace and surrounding alerts.
Size
72 x 63 x 16.4 mm
Weight
<100 g
Operating Temperature
-40° to +85° C
Typical power
4.5 W nominal
Voltage
9-16 VDC
Frequency
76-77 GHz
Interface
CAN-FD
IP Level
IP6K7; IP6K9 with special connector
Channels
4T4R
Detection range
160 m @ 10 dBsm
Range accuracy
6 cm
Range resolution
0.24 m
Speed range
±300 km/h
Speed accuracy
0.023 m/s
Speed resolution
0.14 m/s
Azimuth FoV
150°
Azimuth accuracy
±0.3°
Azimuth separation
4.8°
Elevation FoV
±15°
Elevation accuracy
±1.0°
FuSa / Cybersecurity
Designed for ASIL B (ISO 26262) / HSE / AUTOSAR
4T4R | Calterah 244 | 76-79 GHz
Door Radar – Calterah 244
Ultra-compact CAN-FD door radar for door anti-pinch and opening-angle sensing, designed for ASIL B (ISO 26262) functional safety with AUTOSAR support.
Size
77 × 22 × 10.3 mm
Weight
<35 g
Operating Temperature
-40° to +85° C
Typical power
<2 W
Voltage
9-16 VDC
Frequency
76-79 GHz
Interface
CAN-FD
IP Level
IP6K7
Channels
4T4R
Detection range
120 cm
Range accuracy
2 cm
Range resolution
0.06 m
Speed range
±13 m/s
Speed accuracy
0.02 m/s
Speed resolution
0.14 m/s
Azimuth FoV
140°
Elevation FoV
120°
FuSa / Cybersecurity
Designed for ASIL B (ISO 26262) / HSM / AUTOSAR
76-79GHz 6T8R | 350 m
Picasso 4D Imaging Radar 6x8 TI+NXP
6T8R front imaging radar with long-range, short-range and configurable modes for detection list, optional tracking object and freespace output.
Parameter
Long Range Mode
Short Range Mode
Configurable Mode
Channels
6T8R
Hardware Dimensions
101 x 85.5 x 17.5 mm excluding connector
Compliance
Up to ASIL B / HSM / AUTOSAR
Field of View
Horizontal ±60°; Vertical ±15°
Angular Accuracy
Horizontal ±0.15°; Vertical ±0.5°
Angular Resolution
Horizontal 2.0°; Vertical 4.0°
Detection range
350 m @ 10 dBsm
125 m @ 10 dBsm
Configurable
Range accuracy
0.08 m
0.05 m
Range resolution
0.4 m
0.25 m
Doppler range
±300 km/h
±100 km/h
Doppler accuracy
0.023 m/s
0.012 m/s
Doppler resolution
0.1 m/s
0.06 m/s
Weight
<200 g
Operating Temperature
-40° to +85° C
Typical power
<10 W
Voltage
9-16 VDC
Frequency
76-79 GHz
Interface
CAN-FD / Ethernet
IP Level
IP6K7; IP6K9 with specific connector
24GHz | 0.65-70 m
24GHz Two-Wheeler BSD Radar
Low-power two-wheeler blind spot radar with detections, objects and LCA, RCW, BSD functions.
Size
61 x 45.5 x 13 mm
Weight
<100 g
Operating Temperature
-40° to +85° C
Voltage
9-16 V; 12 V typical
Frequency
24 GHz
Detection range
0.65-70 m
Range resolution
0.65 m
Speed range
-150 to 150 km/h
Speed resolution
0.76 km/h
Azimuth FoV
±60°
Elevation FoV
±30°
Cycle time
75 ms
Interface
CAN; 500K baud
Wireless interface
BLE 5.0
Typical power
<0.8 W
77GHz | 70 m
77GHz Two-Wheeler Rear Radar
Small rear radar with UART output, lighting control and wide temperature operation for motorcycles and e-bikes.
Size
35 x 25 x 22 mm
Weight
<100 g
Operating Temperature
-40° to +85° C
Voltage
9-16 V; 12 V typical
Frequency
77 GHz
Detection range
70 m
Range resolution
0.50 m
Speed range
-150 to 150 km/h
Speed resolution
0.76 km/h
Azimuth FoV
±60°
Elevation FoV
±30°
Cycle time
75 ms
Typical power
1 W
Interface
CAN, RS485, UART
Lighting control
200 mA
77GHz | 100 m
77GHz High-Performance Two-Wheeler BSD Radar
High-performance rear perception for lane-change assistance, rear collision warning and blind spot monitoring.
Lightweight sensing module for commercial inspection, campus operations and industrial service platforms, supporting short-range obstacle awareness, target output and OTA updates.
Size
50 x 60 x 5.5 mm
Weight
<200 g
Operating Temperature
-40° to +85° C
Voltage
5 V
Frequency
24 GHz
Detection range
1.5-60 m
Range resolution
0.65 m
Speed range
-50 to 50 m/s
Speed resolution
0.4 m/s
Azimuth FoV
±45°
Elevation FoV
30°
Cycle time
50 ms
Interface
UART; 921600 baud
Typical power
<0.8 W
60GHz | Indoor safety
Indoor Fall-Detection Radar
Privacy-friendly human detection, body keypoint detection, activity and posture recognition, and fall detection.
Size
60 x 60 x 27 mm
Weight
<200 g
Operating Temperature
-20° to +50° C
Voltage
5 V / 2 A
Frequency
60 GHz
Modulation
FMCW
Bandwidth
3.2 GHz
Detection range
5 m
Azimuth FoV
±50°
Cycle time
50 ms
Operating humidity
5%-95%
Interface
UART; 921600 baud
Wireless interface
WiFi IEEE 802.11 b/g/n/ac
60GHz | 2M+ points/s
Super Sensor
Dense depth sensing module for robots, supporting obstacle detection and classification, multi-target tracking, traversable-space estimation and ground-surface classification.
Size
76.5 x 47 x 25 mm
Operating Temperature
-30° to +65° C
Typical power
4 W nominal; 17 W with heating
Voltage
20 VDC
Frequency
60 GHz
Detection range
20 m
Relative depth accuracy
5% up to 10 m; 8% up to 20 m
Horizontal FoV
102°
Vertical FoV
67°
Depth output
640 x 360 @ 10 fps
Point cloud
Over 2,000,000 points/s
Data interface
CSI / UART over GMSL
Power interface
POC
IP Level
IP67
Time synchronization
PPS + GPRMC
Detection range figures are reference values measured under controlled test conditions. Actual performance may vary based on target reflectivity, environmental conditions and system configuration. 'Designed for ASIL B (ISO 26262)' indicates architectural design intent; final functional safety qualification is subject to customer system-level validation per ISO 26262.
Applications
One perception stack, many markets
Automotive
4D imaging radar and DeepFusion perception support ADAS front and corner sensing, target detection, freespace understanding and all-weather blind-spot coverage across complex road conditions.
Two-Wheelers
Compact 24GHz and 77GHz radars support BSD, LCA and RCW for motorcycles and e-bikes, combining small form factor, low power consumption and wide-temperature operation.
Robots
Super Sensor provides dense depth perception for mobile robots, supporting obstacle recognition, multi-target tracking and freespace understanding for safer navigation in structured and semi-structured environments.
Low-Altitude Platforms
Lightweight 24GHz sensing modules are designed for commercial low-altitude platforms in inspection, campus operations and industrial services, providing short-range obstacle awareness with compact, payload-friendly hardware.
Care & Safety
60GHz FMCW radar enables non-contact sensing for homes, hospitals and elderly care, supporting human presence, posture and fall detection without capturing images.
Traffic Sensing
Roadside radar and AI perception support intersection monitoring, traffic-flow analysis and vulnerable road-user protection, providing reliable sensing in low-light, rain, fog and occluded urban environments.
Join Fusionride and Bring Perception Technology into Real-World Applications
Open roles are updated according to project needs. Candidates with radar, AI perception, embedded software and automotive delivery experience are welcome to contact the HR team.
Grow Through Real Challenges
Work on meaningful sensing products for safer, smarter mobility.
Respect Every Strength
Collaborate in an open, flat team where expertise can be seen.
Support Long-Term Focus
Competitive rewards and practical support for sustainable work.
Employee Benefits
Benefits for Sustainable Engineering Work
Fusionride provides competitive rewards and practical support so every team member can stay focused on meaningful engineering work.
Social insurance and housing fundCommercial insuranceTeam building and birthday eventsTea break, meals and communication supportHoliday benefits and employee purchase programTalent settlement, housing support and shuttle service
Leave a message for HR
For recruitment inquiries, referrals or open applications, please contact the HR team.
Ask product or application questions first, then send a qualified inquiry to the Fusionride business team.
Shanghai R&D Center
7F, Building 1, No. 2377, Shenkun Road, Minhang District, Shanghai City, China
Munich R&D Center
Konrad-Zuse-Platz 8, 81829 Munich, Germany
Fusionride Production Line
Liaobang Road & Fushi Road, Wujiang District, Suzhou, Jiangsu, China
Parent Company: Zadar Labs
Fusionride is a Zadar Labs company. Visit Zadar Labs' official website for high-performance 4D imaging radar technology, SDIR capabilities and product information.
Zadar Labs office: 530 Division Street, Campbell, CA 95008, USA